

W poprzednich trzech częściach tutoriala w szczegółach poznaliśmy sieci konwolucyjne. Przyjrzeliśmy się operacji konwolucji, architekturze sieci konwolucyjnych oraz problemowi overfittingu. W klasyfikacji zbioru CIFAR-10 osiągnęliśmy wynik 81% na zbiorze testowym. Aby pójść dalej, musielibyśmy zmienić architekturę naszej sieci, poeksperymentować z hiperparametrami lub uzyskać więcej danych. Dwa pierwsze rozwiązania zostawiam dla was, 😉 a sam będę chciał w tej części tutoriala przedstawić sieci więcej danych. Skorzystam przy tym z tzw. data augmentation, czyli sztucznego wygenerowania dużej ilości nowych danych.
W czwartej części tutoriala dowiesz się między innymi:
- Czym jest data augmentation?
- Jak skorzystać z generatora danych z biblioteki Keras?
- Jak sztucznie wygenerować nowe dane dla zbioru CIFAR-10?
- Jak poradzi sobie nasz model na zbiorze sztucznie wygenerowanych danych?
Czym jest data augmentation?
Jak już wspominałem w poprzedniej części tutoriala, jeżeli mamy do czynienia z zamkniętym zbiorem danych, czyli takim, którego nie można w istotny sposób powiększyć lub jego powiększenie jest bardzo kosztowne, możemy sięgnąć po mechanizm tzw. data augmentation. Jest to szczególnie wartościowa technika w przypadku analizy obrazów. Dlaczego? Dlatego, że obrazy są podatne na drobne modyfikacje, które dla algorytmu będą nową daną, choć dla ludzkiego oka będą nadal w zasadzie tym samym. Co więcej, takie „drobne modyfikacje” występują w świecie rzeczywistym. Stojąc naprzeciwko samochodu, możemy patrzeć na niego centralnie lub lekko z boku. Będzie to nadal ten sam pojazd i na pewno będzie to dla naszego mózgu samochód. Dla algorytmu spojrzenie na obiekt z innej perspektywy jest cenną informacją pozwalającą lepiej generalizować proces uczenia.
Co w zasadzie możemy zrobić z obrazkiem, który chcemy sztucznie przetworzyć? Teoretycznie mamy nieskończenie wiele rozwiązań: możemy obrazek lekko obrócić, w dowolnym kierunku, o dowolny kąt. Przesunąć w lewo, w prawo, w górę i dół. Zmienić jego kolory lub dokonać innych mniej lub bardziej subtelnych zmian, które dadzą modelowi tony nowych danych. W praktyce zbiór kilkudziesięciu tysięcy obrazków może się stać zbiorem z milionami elementów. Jest to pole, na którym możliwości są naprawdę duże. Jako ciekawostka: technologie związane z autonomicznymi pojazdami są trenowane również na zbiorach danych sztucznie generowanych, np. z wykorzystaniem środowisk realistycznych gier, takich jak GTA.
Generowanie danych z biblioteką Keras
Biblioteka Keras oferuje zestaw pomocnych narzędzi do generowania danych. Spróbujmy przetworzyć generatorem widziany już uprzednio obrazek budynku na Krecie. W pierwszej kolejności dokonujemy niezbędnych importów i definiujemy funkcję, która załaduje obraz z pliku i skonwertuje go do tablicy numpy:
import numpy as npfrom PIL import Imageimport matplotlib.pyplot as plt%matplotlib inline
def convert_image(file): return np.array(Image.open(file))
Ładujemy obrazek, który można pobrać sobie tutaj, wyświetlamy kształt tablicy numpy oraz sam obrazek:
image = convert_image(r'<<wpis_ścieżkę_do_pliku_na_dysku>>\house-small.jpg')image.shape>>> (302, 403, 3)
plt.imshow(image)

Do generowania danych będziemy używali metody flow(x,y) z klasy ImageDataGenerator. Abyśmy byli w stanie użyć jej poprawnie, musimy oczywiście zaimportować klasę, ale także przystosować odpowiednio dane. Metoda oczekuje tensora x, w którym pierwszą pozycją będzie indeks. W naszym przypadku będzie tylko jeden element, ale metoda i tak wymaga indeksu. Dana wejściowa y to labelki, które nie są nam potrzebne dla tego prostego eksperymentu, niemniej musimy je dostarczyć. Stąd:
from tensorflow.keras.preprocessing.image import ImageDataGenerator
x = np.expand_dims(image, 0)x.shape>>> (1, 302, 403, 3)
y = np.asarray(['jakakolwiek-labelka'])
Następnie tworzymy obiekt generatora, przekazując odpowiednie parametry. W specyfikacji dostępnych jest ich naprawdę sporo, poniżej zaprezentowałem kilka przykładowych:
datagen = ImageDataGenerator( width_shift_range=0.2, # przesunięcie wzdłuż osi x height_shift_range=0.2, # przesunięcie wzdłuż osi y rotation_range=20, # rotacja horizontal_flip=True, # odwrócenie poziome vertical_flip = True, # odwrócenie pionowe rescale=1./255, # parametr niezbędny, aby dobrze zwizualizować dane shear_range=0.25, # przycinanie obrazu zoom_range=0.25, # zoom)
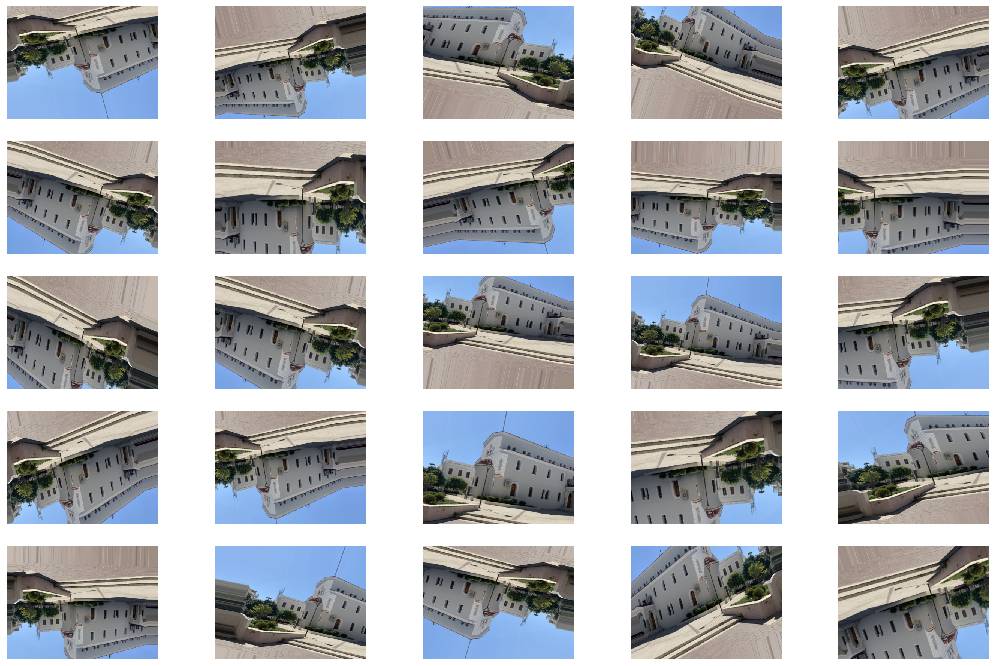
Pozostaje teraz wywołać metodę flow(x, y), przekazując do niej przygotowane dane i odbierając oraz wyświetlając wygenerowane obrazy.
figure = plt.figure()i = 0for x_batch, y_batch in datagen.flow(x, y): a = figure.add_subplot(5, 5, i + 1) plt.imshow(np.squeeze(x_batch)) a.axis('off') if i == 24: break i += 1figure.set_size_inches(np.array(figure.get_size_inches()) * 3)plt.show()
Wynik? Dosłownie i w przenośni nieco postawiony na głowie 😉 i trochę „przerysowany”, bo niektóre parametry mają ustawione duże wartości, ale dobrze oddaje możliwości generatora. Możecie sami poeksperymentować z ustawieniami.
Data augmentation na zbiorze CIFAR-10
Uzbrojeni w generator, możemy jeszcze raz podejść do klasyfikacji zbioru CIFAR-10. Większość kodu była już omawiana w poprzednich częściach tutoriala, więc podam ją tu tylko dla zapewnienia spójności i jasności. Na wstępie wykonujemy niezbędne importy, załadowanie zbioru oraz budujemy model:
import numpy as np
%tensorflow_version 2.ximport tensorflow
import matplotlib.pyplot as plt%matplotlib inline
from tensorflow import kerasprint(tensorflow.__version__)print(keras.__version__)>>> 1.15.0>>> 2.2.4-tffrom tensorflow.keras.datasets import cifar10(x_train,y_train), (x_test,y_test) = cifar10.load_data()from tensorflow.keras.models import Sequentialfrom tensorflow.keras.optimizers import RMSpropfrom tensorflow.keras.layers import Convolution2D, MaxPool2D, Flatten, Dense, Dropout, BatchNormalizationfrom tensorflow.keras import regularizersfrom tensorflow.keras.utils import to_categoricalmodel = Sequential([ Convolution2D(filters=128, kernel_size=(5,5), input_shape=(32,32,3), activation='relu', padding='same'), BatchNormalization(), Convolution2D(filters=128, kernel_size=(5,5), activation='relu', padding='same'), BatchNormalization(), MaxPool2D((2,2)), Convolution2D(filters=64, kernel_size=(5,5), activation='relu', padding='same'), BatchNormalization(), Convolution2D(filters=64, kernel_size=(5,5), activation='relu', padding='same'), BatchNormalization(), MaxPool2D((2,2)), Convolution2D(filters=32, kernel_size=(5,5), activation='relu', padding='same'), BatchNormalization(), Convolution2D(filters=32, kernel_size=(5,5), activation='relu', padding='same'), BatchNormalization(), MaxPool2D((2,2)), Convolution2D(filters=16, kernel_size=(3,3), activation='relu', padding='same'), BatchNormalization(), Convolution2D(filters=16, kernel_size=(3,3), activation='relu', padding='same'), BatchNormalization(), Flatten(), Dense(units=32, activation="relu"), Dropout(0.15), Dense(units=16, activation="relu"), Dropout(0.05), Dense(units=10, activation="softmax")])optim = RMSprop(lr=0.001)model.compile(optimizer=optim, loss='categorical_crossentropy', metrics=['accuracy'])Po przygotowaniu i pomyślnym skompilowaniu modelu definiujemy generator. Zakładamy, że dane będą rotowane o 10 stopni, dopuszczamy odwrócenie poziome, ale już nie pionowe, aby nie „stawiać rzeczy na głowie”. Generator będzie też przesuwał obrazki w pionie i poziomie o 10%. Dopuszczalny jest też niewielki zoom i shear. Pamiętajmy, że obrazki są niewielkie i mocniejsze modyfikacje mogą sprawić, że obraz będzie trudny do rozpoznania nawet dla człowieka:
from tensorflow.keras.preprocessing.image import ImageDataGenerator
datagen = ImageDataGenerator( rotation_range=10, horizontal_flip=True, vertical_flip = False, width_shift_range=0.1, height_shift_range=0.1, rescale = 1. / 255, shear_range=0.05, zoom_range=0.05,)Potrzebujemy również one-hot encodingu dla labelek zbiorów uczących i testowych. Ustalamy wielkość batcha i generator w zasadzie gotowy:
y_train = to_categorical(y_train)y_test = to_categorical(y_test)
batch_size = 64train_generator = datagen.flow(x_train, y_train, batch_size=batch_size)
Powyższy generator będzie źródłem danych dla procesu uczenia. Co jednak ze zbiorem walidacyjnym, który umożliwi nam śledzenie postępów? Otóż musimy zdefiniować odrębny generator, który jednak nie będzie w żaden sposób modyfikował źródłowych obrazków:
datagen_valid = ImageDataGenerator( rescale = 1. / 255,)
x_valid = x_train[:100*batch_size]y_valid = y_train[:100*batch_size]
x_valid.shape[0]>>>6400
valid_steps = x_valid.shape[0] // batch_sizevalidation_generator = datagen_valid.flow(x_valid, y_valid, batch_size=batch_size)
Jak widać powyżej, zbiór, którego proces uczenia będzie używał do walidacji, będzie miał wielkość 100 paczek danych. Na podstawie wielkości tego zbioru i wielkości paczki wyliczamy również ilość kroków walidacji – dane te będą potrzebne do wywołania funkcji uczenia.
history = model.fit_generator( train_generator, steps_per_epoch=len(x_train) // batch_size, epochs=120, validation_data=validation_generator, validation_freq=1, validation_steps=valid_steps, verbose=2)
Zwróćcie uwagę, że nie używamy metody fit(), jak to miało miejsce uprzednio, lecz metody fit_generator(), która przyjmuje na wejściu generator z danymi uczącymi oraz (opcjonalnie) generator danych walidacyjnych. Mając tak dużo danych, będziemy uczyli 120 zamiast 80 epok, licząc na to, że unikniemy overfittingu.
>>> Epoch 1/120>>> Epoch 1/120>>> 781/781 - 49s - loss: 1.8050 - acc: 0.3331 - val_loss: 1.5368 - val_acc: 0.4581>>> Epoch 2/120>>> Epoch 1/120>>> 781/781 - 41s - loss: 1.3230 - acc: 0.5249 - val_loss: 1.1828 - val_acc: 0.5916>>> Epoch 3/120
(...)
>>> 781/781 - 39s - loss: 0.1679 - acc: 0.9473 - val_loss: 0.1484 - val_acc: 0.9463>>> Epoch 119/120>>> Epoch 1/120>>> 781/781 - 38s - loss: 0.1708 - acc: 0.9466 - val_loss: 0.1538 - val_acc: 0.9538>>> Epoch 120/120>>> Epoch 1/120>>> 781/781 - 39s - loss: 0.1681 - acc: 0.9486 - val_loss: 0.1379 - val_acc: 0.9534
W procesie uczenia otrzymaliśmy accuracy na poziomie 95% i to dla obu zbiorów. Widać to zresztą również na poniższym wykresie:
print(history.history.keys())>>> dict_keys(['loss', 'acc', 'val_loss', 'val_acc'])
plt.plot(history.history['acc'])plt.plot(history.history['val_acc'])plt.title('Model accuracy')plt.ylabel('Accuracy')plt.xlabel('Epoch')plt.legend(['Train', 'Valid'], loc='upper left')plt.show()
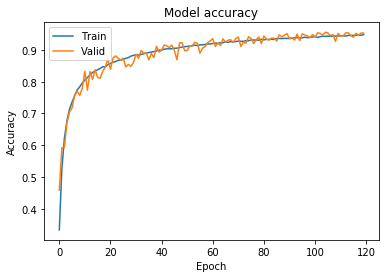
Ze względu na brak overfittingu i widoczny gołym okiem progres parametrów uczenia do samego końca, być może moglibyśmy pokusić się o dalsze zwiększenie ilości epok.
Sprawdźmy jak wyuczony model poradzi sobie na danych testowych, których jeszcze nie widział.
x_final_test = x_test / 255.0eval = model.evaluate(x_final_test, y_test)>>> 10000/10000 [==============================] - 3s 314us/sample - loss: 0.5128 - acc: 0.8687
A zatem osiągnęliśmy accuracy na poziomie 87%, o 6% więcej niż w wersji modelu bez generowania danych.
Najważniejsze jednak, że model wykazuje ochotę do dalszego uczenia, bez szkody dla accuracy na zbiorze walidacyjnym i testowym.
To już ostatni post w tym tutorialu. Mam nadzieję, że udało mi się przybliżyć kilka ciekawych zagadnień związanych z sieciami konwolucyjnymi.
Masz pytanie? Zadaj je w komentarzu.
Spodobał ci się post i cały tutorial? Będzie mi miło, gdy go polecisz.
Do zobaczenia wkrótce, przy okazji omawiania innego ciekawego tematu!
Super materiał, przerobiłem cały, dziękuję, jestem na prawdę wdzięczny!
Hej, fajnie, że materiał się przydał i spodobał – dzięki!
Ciekawy materiał. Dzięki za wysiłek włożony w jego przygotowanie!
Dzięki za uznanie!
Super materiał. Czekam na kolejne.